in Bearbeitung
23. Januar 2014
 APRS Decoder using ARDUINO "UNO",
ARGENTDATA "RadioShield" and 1.8" TFT Display. Here
is automatic translation made by Google:
APRS Decoder using ARDUINO "UNO",
ARGENTDATA "RadioShield" and 1.8" TFT Display. Here
is automatic translation made by Google:http://translate.google.de/translate?sl=de&tl=en&js=n&prev=_t&hl=de&ie=UTF-8&u=http%3A%2F%2Fwww.kh-gps.de%2Fardu_tft.htm
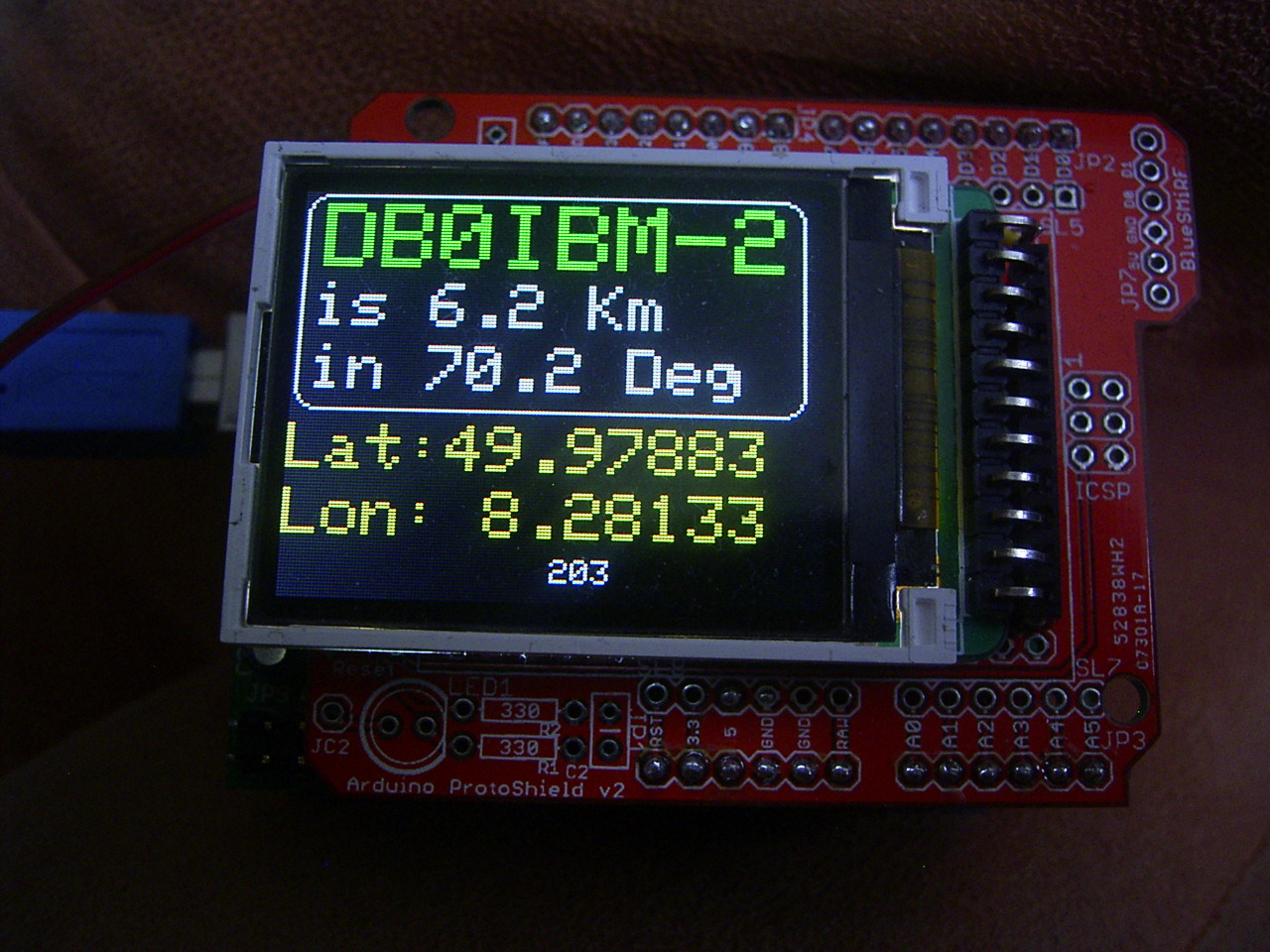
Abb.1 Beispiel für Decoderanzeige
Ziel war der Aufbau
einer kleinen autarken Einheit zur Beobachtung der regionalen
APRS-Aktivitäten. Stark vereinfacht wurde dieses Vorhaben durch
Einsatz des Radio Shields der Firma ARGENTDATA [1],[2]. Mit diesem
Baustein hatte ich mich auch früher schon einmal beschäftigt
[5] und es gibt auch eine inländische Bezugsquelle [3].
Verarbeitet werden dabei die vom Tonausgang eines FM-Empfängers
bereitgestellten AFSK-Signale, wozu das Empfangsgerät lediglich
auf die jeweils benutzte APRS-Frequenz ( USA: 144.39MHz, EUR: 144.8MHZ
) einzustellen ist. Die vom Radio Shield decodierten Eingangsdaten
stehen mit einer Rate von 4800bps an seinem Datenausgang zur
Verfügung. Nach Aufstecken des Shields auf z.B. ein ARDUINO-UNO
Board, liegen sie an dessen seriellem Eingangsport "#0" an. Nachdem der
gleiche Port auch mit dem Ausgang des auf dem Processor Board
befindlichen USB-Schaltkreises verbunden ist, kann es an dieser Stelle
zu Kollisionen kommen. Dieses Problem wird umgangen, indem die
Brücke "JP7" ( Abb.4 und 5 ) jeweils für die Zeit der
Programmiervorgänge entfernt und damit die Verbindung zum Radio
Shield unterbrochen wird.
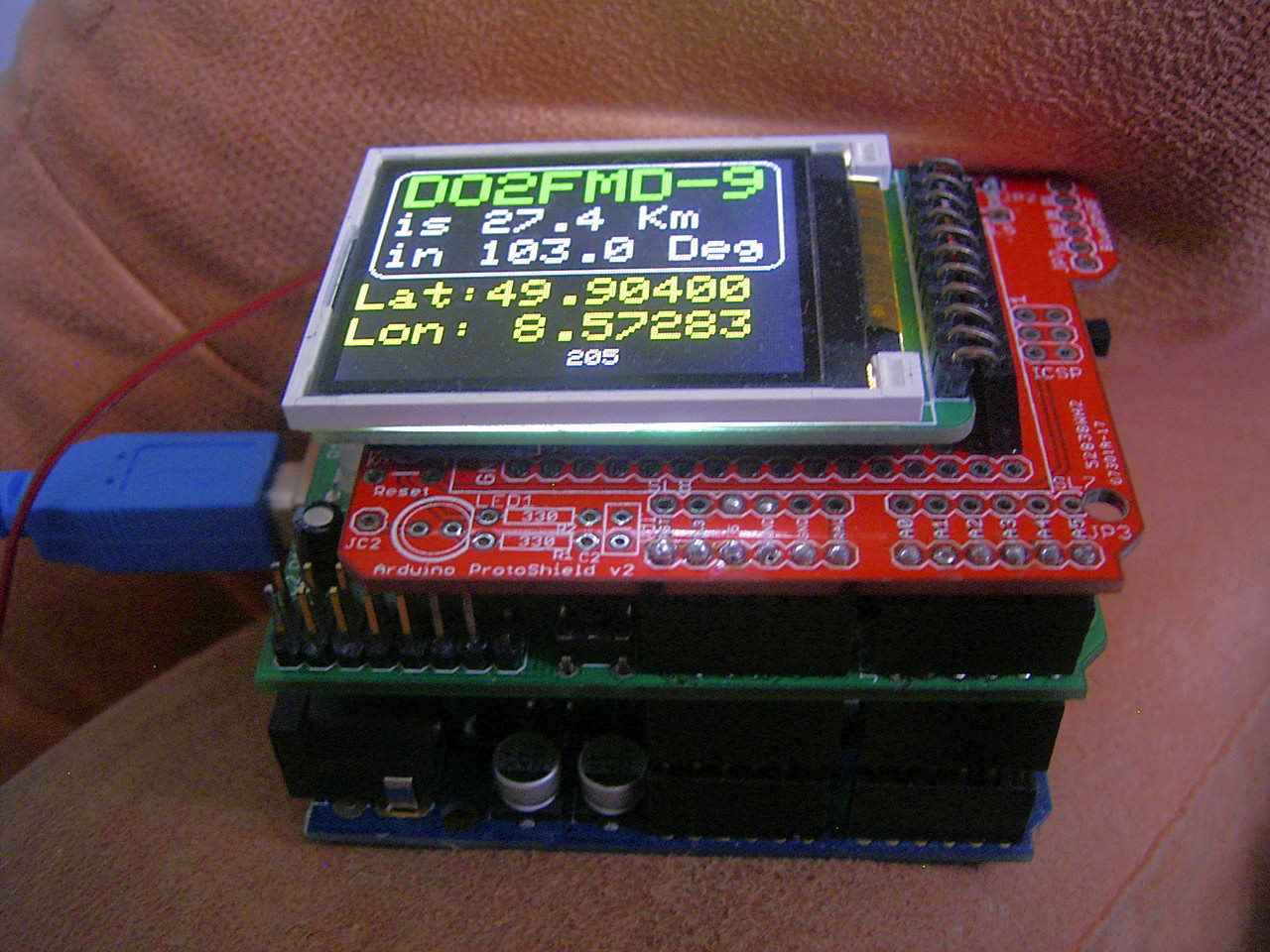
Abb.2 Anordnung der Gesamtdecodereinheit
Die Verarbeitung der
vom FM-Empfänger kommenden Tonsignale erfolgt in der aus drei
Baugruppen bestehenden Decodereinheit ( siehe Abb.2 ). Dabei sehen wir
zuunterst das ARDUINO UNO-Board. Aufgesteckt ist das Radio Shield und
den Abschluss nach oben bildet ein entsprechend Abb.6 selbst zu
beschaltendes Proto-Shield. Hierüber werden die Verbindungen zum
verwendeten TFT-Display hergestellt.
Abb.3 Blockschaltbild der Gesamtanordnung ( GPS-Nutzung optional [ siehe Text ] )
Im sehr
empfehlenswerten ARRL Buch "Ham Radio for Arduino and PICAXE" [6] fand
ich eine Library, die wesentliche Aufgaben der Decodierung von APRS
Signalen übernehmen kann. Dabei werden nicht nur das Standard-,
sondern auch das komprimierte MICE-Format verarbeitet. Neben
einer Bereitstellung in empfangenen Protokollen enthaltener
Standortdaten, gehört zu ihrem weiteren Leistungsumfang auch die
Ermittlung von Distanz- und Richtungswerten zwischen zwei
geographischen Punkten. Alle genannten Daten werden somit ausgewertet
und auf dem zugehörigen Display angezeigt ( Abb.1 ). Am unteren
Displayrand ist zudem ein nach jeder erfolgreichen Decodierung
incrementierender Upcounter zu sehen.
In der derzeitigen Programmversion ist die zur Ermittlung von Distanz- und Richtungwerten bentzte Referenzposition ( Eigen-Lat und -Lon ) NUR in Form fest im Programmcode abgelegter Daten enthalten, kann durch die Nutzer aber jederzeit entsprechend eigener Wünsche verändert werden. Für späteren auch mobilen Einsatz ist vorgesehen, in einer späteren Programmversion an dieser Stelle bedarfsweise auch von einem angeschlossenen GPS-Empfänger stammende aktuelle Referenzdaten nutzen zu können. Die dann zusätzlich notwendigen Verbindungen wurden in Abb.3 bereits angedeutet.
In der derzeitigen Programmversion ist die zur Ermittlung von Distanz- und Richtungwerten bentzte Referenzposition ( Eigen-Lat und -Lon ) NUR in Form fest im Programmcode abgelegter Daten enthalten, kann durch die Nutzer aber jederzeit entsprechend eigener Wünsche verändert werden. Für späteren auch mobilen Einsatz ist vorgesehen, in einer späteren Programmversion an dieser Stelle bedarfsweise auch von einem angeschlossenen GPS-Empfänger stammende aktuelle Referenzdaten nutzen zu können. Die dann zusätzlich notwendigen Verbindungen wurden in Abb.3 bereits angedeutet.
Abb.4 Blick auf das Radio-Shield ( Jumper "JP7" während des Programmiervorgangs öffnen )
Abb.5 Anschaltung des Radio-Shields ( LED und GPS-Nutzung optional )
Abb.6 Selbstzuverdrahtendes Proto-Shield zur Anschaltung des TFT-Displays
NACHBAU
DOWNLOAD:
aprs-decoder.zip
LINKLISTE
[1] https://www.argentdata.com/catalog/product_info.php?products_id=136
[2] http://wiki.argentdata.com/index.php?title=Radio_Shield
[3] http://www.jaeger-edv.de/Shop/index.php?
[4] http://www.sainsmart.com/sainsmart-1-8-spi-lcd-module-with-microsd-led-backlight-for-arduino-mega-atmel-atmega.html
[5] http://www.kh-gps.de/radioshield.htm
[6] https://wa5znu.org/cookbook/
[2] http://wiki.argentdata.com/index.php?title=Radio_Shield
[3] http://www.jaeger-edv.de/Shop/index.php?
[4] http://www.sainsmart.com/sainsmart-1-8-spi-lcd-module-with-microsd-led-backlight-for-arduino-mega-atmel-atmega.html
[5] http://www.kh-gps.de/radioshield.htm
[6] https://wa5znu.org/cookbook/
E-Mail contact via:

